Emanuel Aldea 
Email : emanuel.$lastname$ @ u-psud.fr
Address : Bureau 2069, Lab. SATIE, Batiment 660 DIGITEO, rue Noetzlin, Gif-sur-Yvette, 91190 France
Directions : if you visit our offices, check the guide
I am working as an Associate Professor at Paris-Saclay University, in the MOSS (Methods and Systems for Signal Processing) group of SATIE. I completed my PhD in 2009 at Télécom ParisTech, under the supervision of Isabelle Bloch.
My work draws from the areas of computer vision and machine learning, applied to a variety of problems in image understanding, cartography and 3D reconstruction.
Trying to schedule a meeting with me? Check my availability here!
Jump straight to:
Some news
- 06.2024
- Thank you to everyone involved in the DL-SP+PM crash course !
- 12.2023
- Congratulations to Xuanlong Yu for defending his PhD, and all the best for the future!
- 02.2022
- The conference BELIEF 2022 will be organized in Paris, France!
| Current research activities |
High-density crowd analysis

Keywords: multiple camera networks, wide baseline calibration, segmentation, tracking, fluid dynamics
The figure on the right shows the crowd in the holy Muslim site of Makkah in October 2012 during the peak of the pilgrimage, filmed with our camera system. The broad purpose of this research project is to enable us to understand in detail the mechanisms and the evolution of human interactions in high-density crowds (more than 4-5 people per square meter). The multiple camera setup allows us to overcome the issues created by occlusion and to have extra information for performing reliable tracking in these difficult conditions. There are interesting projects focusing on modeling animal behaviour in large, dense groups; similarly, once highly accurate individual tracking is performed in dense human crowds, we expect to obtain surprising results about the apparition of crowd instability that will be very helpful in preventing loss of human life, and in infrastructure planning.
Starting 11.2015, the ANR project MOHICANS supports this research. More details are provided here.
Real-time cartography and pose estimation


Keywords: robotics, SLAM, bundle adjustment, sensor fusion
I am interested in working on navigation problems related to image processing and data fusion, and in finding solutions that may leverage some limitations of existing SLAM algorithms. The applications in this domain are various: autonomous robots and UAVs, intelligent vehicles, cartography, pose estimation, servoing, planning etc. I am particularly interested in modelling how different sensors exhibit varying performances depending on complex factors such as ego-motion, scene etc. An example of this kind of work is SuperFAST.
NDE for infrastructure assessment

Keywords: crack detection, non destructive examination, image processing, a-contrario, marked point processes, UAV
Our society will benefit significantly from the large scale automated NDE which is foreseeable in the light of the current advances in robotic vision. I am interested in improving the performance of currently available algorithms for the detection of cracks in the specific context of aerial inspection, which is often characterized by image quality degradation. Our team evaluated different families of, and proposed, algorithms based on minimal cost path analysis, on image percolation, on marked point processes and on a-contrario strategies. In the publications, we highlight their respective advantages and limitations (with respect to detection accuracy, degradations such as motion and focus blur, computational cost and potential for real time processing etc).
| Previous research activities |
Monocular depth field estimation with known camera motion
Keywords: depth maps, optical flow, asymptotic observers, TV-L1 regularization
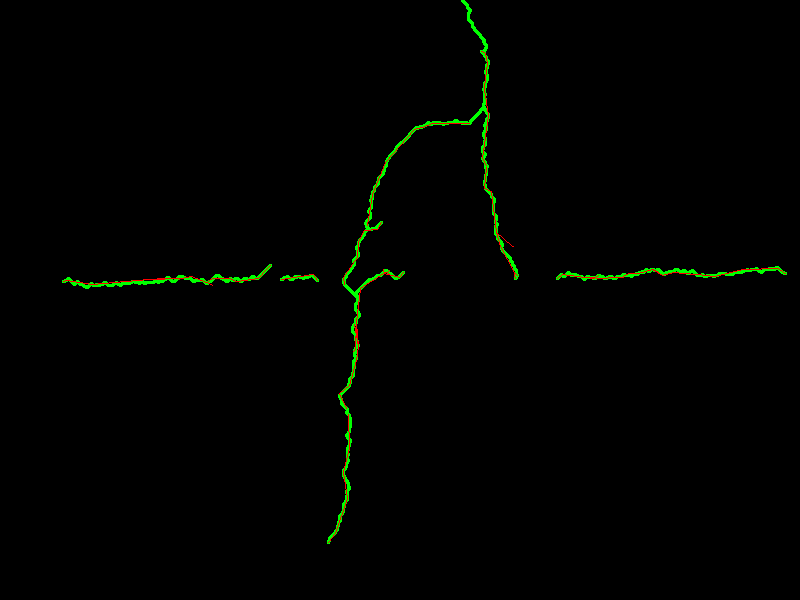
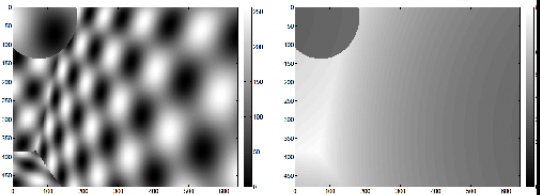
The objective of this work is to reconstruct the dense structure of a static scene observed by a monocular camera system following a known trajectory. One of our contributions is represented by providing a TV-L1 energy functional that estimates directly the unknown depth field given the camera motion, thus avoiding to estimate as an intermediate step an optical flow field with additional geometric constraints. Our method has two main interests: we highlight a practical minimal parametrization for the given assumptions (static scene, known camera motion) and we solve the resulting variational problem using an efficient, discontinuity preserving formulation. In this work, we also propose a solution for integrating the sequence of depth observations using asymptotic observers. The scheme is derived from a suitable optical flow formulation that highlights efficiently the known camera motion. The motion parameters may be obtained from inertial sensors, from a motion capture system or if applicable from a visual odometry algorithm.
Multi-modal tracking
Keywords: tracking, particle filters, multiple appearance models
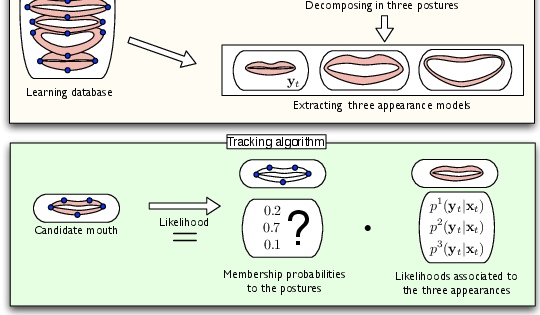
In this work, we propose a novel method to track an object whose appearance is evolving in time. The tracking procedure is performed by a particle filter algorithm in which all possible appearance models are explicitly considered using a mixture decomposition of the likelihood. Then, the component weights of this mixture are conditioned by both the state and the current observation. Moreover, the use of the current observation makes the estimation process more robust and allows handling complementary features, such as color and shape information. In the proposed approach, these estimated component weights are computed using a Support Vector Machine (but unsupervised learning might be a very interesting possibility too). Tests on a mouth tracking problem show that the multiple appearance model outperforms classical single appearance likelihood.
Structured data learning for image interpretation
Keywords: structured data learning, graphical models, graph kernels, support vector machines, image interpretation, multiple kernel learning, fuzzy logic, spatial relations
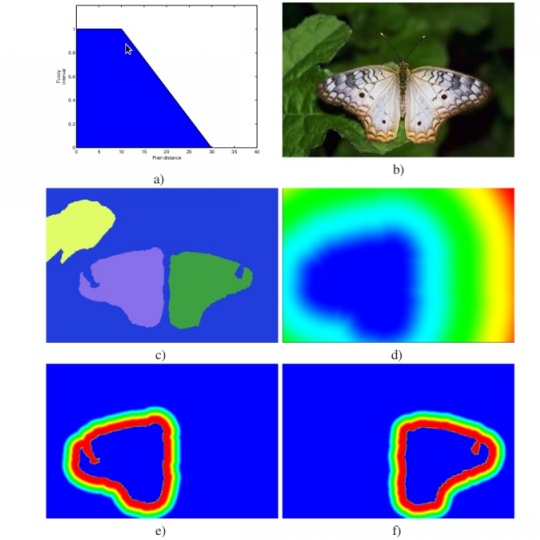
Image interpretation methods use primarily the visual features of low-level or high-level interest elements. However, spatial information concerning the relative positioning of these elements is equally beneficial, as it has been shown previously in segmentation and structure recognition. Therefore, an interest for the integration of spatial information in the learning framework has emerged recently. The fact that spatial information is often perceived and expressed in a manner which is close to natural language, along with the fact that the absence of a spatial interaction is also relevant, hint at the usefulness of fuzzy spatial information for image representation. Fuzzy representations actually permit to assess at the same time the imprecision degree of a relation (e.g., ``close to'' or ``to the left of'') and the gradual transition between the satisfiability and the non-satisfiability of a relation. Among the solutions used to adapt image data to algorithm inputs, we adopt a representation structure which encodes explicitly image parts and spatial interactions in a graphical model.
The objective of this work is to explore techniques of spatial information representation and their integration in the learning process, within the context of image classifiers that make use of graph kernels. We motivate our choice of labeled graphs for representing images, in th e context of learning with SVM classifiers. Graph kernels have been studied intensively in computational chemistry and the study of biologic systems, and an adaptation for image related graphs is necessary, since image structures and properties of the information encoded in the labeling are fundamentally different. We illustrate the integration of spatial information within the image graphical model by considering fuzzy adjacency measures between interest elements (regions), and we define a family of graph representations determined by different thresholds applied to these spatial measures. Finally, we employ multiple kernel learning methods in order to build up classifiers that can take into account different graphical representations of the same image at once. The results show that spatial information complements the visual features of distinctive elements in images and that adapting the discriminative kernel functions for the fuzzy spatial representations is beneficial in terms of performance.
| Available positions |
For any Master internship position available, the information will be posted here. Please do not contact me for undergraduate level internships, and/or shorter than 5-6 months (the only exception: you already interacted with me personally, or a professor I know may provide a recommendation for you). I do my best to provide some feedback to prospective interns, but if your profile/application is pretty much unrelated to the internship description, my reply will have a low priority.
Available Master internship positions :
- none for the moment
Available PhD positions :
- none for the moment
Available postdoctoral position :
- none for the moment
| Current and past students |
PhD Students :
- Mehdi Ghrabli, with Mounira Bouarroudj and Ludovic Chamoin, A mixed modeling approach based on failure physics and data for the virtualization of power component aging tests , Dec. 2022 -
- Olivier Laurent, with Adrien Chan Hon Tong and Gianni Franchi, Linking Natural Gradient Descent to Uncertainty via Active Learning , Oct. 2022 -
- Ichraq Lemghari, with Sylvie Le Hégarat-Mascle and Jennifer Vandoni, Deep Supervised Learning with Noisy Annotations: application to NDT , Apr. 2022 -
- Xuanlong Yu, with Gianni Franchi, Uncertainty quantification for vision regression tasks , Oct. 2020 - Dec. 2023
- Alireza Rezaei, with Sylvie Le Hégarat-Mascle, Historical music instrument 3D reconstruction and wear detection in UV-induced fluorescence photography , Oct. 2018 - Jun. 2022
- Huiqin Chen, with Sylvie Le Hégarat-Mascle, Egocentric video registration for collaborative localization , Dec. 2017 - Apr. 2021. Researcher at AOT Basel.
- Jennifer Vandoni, with Sylvie Le Hégarat-Mascle, Ensemble Methods for Pedestrian Detection in Dense Crowds , Dec. 2015 - May 2019. Researcher at Safran.
- Nicola Pellicanò, with Sylvie Le Hégarat-Mascle, Tackling pedestrian detection in large scenes with multiple views and representations , Oct. 2015 - Dec. 2018. Researcher at Meta.
Postdoc Researchers :
- Juan Cuenca, Electric distribution network predictive management, with Anne Blavette (CNRS) and Guy Camilleri (IRIT) , Jan. 2024 -
- Gianni Franchi, Large scale tracking , Jan. 2019 - Feb. 2020
Master internships :
- Younes Hamai (Paris-Saclay University, M1) with Nicolas Praly , Study of the fallout time of light launcher fragments , May-August 2023
- Phan-Anh Vu (Paris-Saclay University, M2) with Mounira Bouarroudj and Sylvie Le Hégarat-Mascle, Probabilistic and physics-informed machine learning for predictive maintenancewith time series data , March-August 2022
- Margaux Lehut (ENS Paris-Saclay, M1) with Marie Ruellan Implementation of a building meta-model for controlling windows/shutters based on comfort/IAQ/Energy criteria , Mai-July 2022
- Yan Chen (ENSTA Paris, M2) with Gianni Franchi Uncertainty and deep learning on vehicular imaging datasets , April-September 2021
- Xuanlong Yu (Télécom Saint Etienne, M2) with Gianni Franchi Enhanced annotation of pedestrian data in video sequences with active learning , March-August 2020
- Solal Nathan (ENS Paris-Saclay, M1) Confidentialité des données personnelles et analyse de foules, Mai-August 2020
- Rémi Kazmierczak (ENS Paris-Saclay, M1) with Gianni Franchi Extraction de paramètres de dynamique piétonnière pour l’analyse microscopique de scènes denses , Mai-August 2020
- Zhuzhi Fan (INSA Lyon - Paris Sud University, M2) Localization of a mobile camera wearer for security in urban environments , March-August 2019
- Corentin Presvots (ENS Paris Saclay, M1), with Andrei Constantinescu, LMS, Ecole Polytechnique A vision-based study of auxetic meta-materials , May-July 2018
- Yixuan Yao (Paris Sud University, M1) Flying object detection for locating mobile cameras , June-July 2018
- Kevin Mercier (Paris Sud University, M1), with Guillaume Charpiat Deep network optimization for crowd analysis , May-Aug. 2018
- Thi-Hao Nguyen (Japan Advanced Institute of Science and Technology, M2), with Andrei Constantinescu, LMS, Ecole Polytechnique 3D registration for the deformation of nanomaterials , March-Aug. 2018
- Alireza Rezaei (University Jean Monnet, M2) GPU acceleration and 3D rendering for multiple camera pedestrian detection , Jan.-July 2018
- Raphaël Guegan (Paris Sud University, M1) with Guillaume Charpiat, Réseaux de neurones pour l’étude de la dynamique des foules , May-Sept. 2017
- Camille Palmier (Paris Sud University, M1) with Paola Goatin, Validation de modèles macroscopiques non-locaux de dynamique de foule , May-Sept. 2017
- Lucile Denet (Télécom Physique Strasbourg, M2) with Thales Avionics, Hybridation inertie et vision pour des applications aéronautiques , Mar.-Aug. 2016
- Sen Yan (Paris Sud University, M1), Inference de la structure de la scene pour l'analyse multi-camera d'espaces urbains , May.-Jul. 2016
- Huiqin Chen (Paris Sud University, M1), Analyse du flot des foules denses pour la caractérisation de leur dynamique , Jun.-Jul. 2015
- Victor Truong (ENS Cachan, M1), High speed IMU-camera registration , May-Jul. 2015
- El Mehdi Abdali (Paris Sud University, M2) with Theraclion, HIFU propagation analysis for non-invasive tumor therapy , Mar.-Aug. 2015
- Davide Marastoni (University of Pavia, M2), High-density Crowd Segmentation , Mar.-Jul. 2014
- Romain Saussard (INSA Lyon, M2), Cartographie étendue par fusion de cartes locales à l'aide de capteurs inertiels , Feb.-Aug. 2012
Short Master projects :
- Fatma Kara, Marie-Issa Calixte (Paris-Saclay University, M2), with Nicolas Lermé Détection de cratères dans des images de corps astronomiques , 2021
- Rodrigo Perez Alvarez, Ignacio Rodriguez Garcia (Télécom Paris, M2), Tiphaine Plusquellec (ECE, M2) Visualisation des activations en apprentissage , 2020
- Zhuzhi Fan, Mohammed Chghaf (Paris Sud University, M2), Calibration of a wide baseline multiple camera system , 2019
- Hacène Karrad, Yassine Ouali, Jingkun Yang (Paris Sud University, M2) with Jean-Pierre Barbot and Isabelle Vin, Indoor geolocalization with wi-fi based fingerprinting and vision , 2018
- Christophe Ribal, Victor Truong (ENS Cachan, M2), Reduction de dimmensionalité pour la détection de têtes , 2017
- Wei Liu, Le Sun (Paris Sud University, M2), La détection de fissures en utilisant l'algorithme FOSA , 2016
- Kenza Benseghir, Zineb Saadaoui (Paris Sud University, M2), Implémentation de l'algorithme EDLines , 2016
- Chun Geng, Xiao-Kang Ma (Paris Sud University, M1), Surveillance d’abeilles en vol à l’aide de la vision par ordinateur , 2016
- Wen Dai, Sen Yan (Paris Sud University, M1), Étude de la fréquence du battement des ailes d’une abeille avec des caméras à fréquence variable , 2016
- Yali Zhu, Wei Liu (Paris Sud University, M1), L'algorithme de percolation pour la detection de fissures en NDE , 2015
- Hongyi Wang, Yameng Li (Paris Sud University, M1), Suivi autonome d'une cible par un quadri-rotor , 2014
- Siyuan Liu (Paris Sud University, M1), Etude d'images de hybridation fluorescente in situ (FISH) pour la détection d'anomalies génétiques , 2014
- Mehdi Sadouni (Paris 6 University, M2), Apprentissage pour la détection de points d'intérêt et descripteurs locaux robustes en temps réel , 2011
- Romain Bachy (Paris 6 University, M2), Recherche d’images similaires à partir de descripteurs couleurs, 2010
| Professional services |
I am regularly involved in evaluation activities for:
- - journals
- MVAP, PR, TNNLS, TCSVT, CVIU, SMCB, FSS, IEEE Transactions on Cybernetics, IEEE Transactions on Multimedia, IEEE Transactions on Industrial Informatics
- - conferences
- CVPR, ICCV, ICRA, IROS, MVA, AVSS, FUSION
- - research agencies
- ANR (France), PRIN (Italy)
| Teaching |
I am currently involved in the following courses (academic year 2023-2024):
- M1 E3A Orsay
- 443 - Object oriented programming and algorithm design (CM : 21h, TP : 24h, TD : 5h)
- M1 E3A Orsay
- 453 - Image and signal processing, together with Thomas Rodet (CM : 20h, TP : 16h, TD : 14h)
- M1 E3A Orsay
- 471 - Study and research project (TP : 10-20h)
- M2 E3A SETI
- 501 - C++ intensive course (TP : 14h)
- M2 E3A SETI
- 554 - Robotic vision, together with Nicolas Lermé (CM : 18h, TP : 6h)
- M2 E3A SETI
- 554 - Data fusion, together with Sylvie Le Hégarat-Mascle (CM : 9h, TP : 6h)
- M2 E3A SETI
- 519 - Research seminar on ethics in robotics research, together with Nicolas Gac (CM : 3.5h)
- DU OC2
- Photometry and colorimetry (CM : 7h)
- Polytech Paris Saclay
- 5APP Image processing (CM : 8h, TP : 8h, TD : 8h)
- Pavia Univ., CS Master
- Computer vision (CM : 12h)
| Publications |
A symmetry-aware exploration of Bayesian neural network posteriors, Olivier Laurent, Emanuel Aldea and Gianni Franchi ICLR 2024, online version, bib
@inproceedings{laurent24iclr,
author = {Olivier Laurent and
Emanuel Aldea and
Gianni Franchi
},
title = {A symmetry-aware exploration of Bayesian neural network posteriors},
booktitle = {The 12th International Conference on Learning Representations},
pages={},
year = {2024}
}
Discretization-Induced Dirichlet Posterior for Robust Uncertainty Quantification on Regression, Xuanlong Yu, Gianni Franchi, Jindong Gu and Emanuel Aldea, AAAI 2024, online version, bib
@inproceedings{yu24aaai,
author = {Xuanlong Yu and
Gianni Franchi and
Jindong Gu and
Emanuel Aldea},
title = {Discretization-Induced Dirichlet Posterior for Robust Uncertainty Quantification on Regression},
booktitle = {The 38th Annual AAAI Conference on Artificial Intelligence},
pages={},
year = {2024}
}
Hybrid modeling for remaining useful life prediction in power module prognosis, Mehdi Ghrabli, Mounira Bouarroudj, Ludovic Chamoin and Emanuel Aldea, EuroSimE 2024, bib
@INPROCEEDINGS{ghrabli24eurosime,
author={Ghrabli, Mehdi and Bouarroudj, Mounira and Chamoin, Ludovic and Aldea, Emanuel},
booktitle={2024 25th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE)},
title={Hybrid modeling for remaining useful life prediction in power module prognosis},
year={2024},
volume={},
number={},
pages={1-8},
keywords={},
month={April}
}
Encoding the Latent Posterior of Bayesian Neural Networks for Uncertainty Quantification, Gianni Franchi, Andrei Bursuc, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023 online version, bib
@ARTICLE{franchi23pami,
author={Franchi, Gianni and Bursuc, Andrei and Aldea, Emanuel and Dubuisson, Séverine and Bloch, Isabelle},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
title={Encoding the Latent Posterior of Bayesian Neural Networks for Uncertainty Quantification},
year={2023},
volume={},
number={},
pages={1-13},
doi={10.1109/TPAMI.2023.3328829}
}
Multi-temporal image analysis for preventive conservation of historical musical instruments, Alireza Rezaei, Emanuel Aldea, Sylvie Le Hégarat-Mascle, Piercarlo Dondi and Marco Malagodi, Journal on Computing and Cultural Heritage, 2023 draft, bib
@article{rezaei23jocch,
author = {Alireza Rezaei and
Emanuel Aldea and
Sylvie Le H{\'{e}}garat{-}Mascle and
Piercarlo Dondi and
Marco Malagodi},
title = {Multi-temporal image analysis for preventive conservation of historical musical instruments},
journal = {Journal on Computing and Cultural Heritage},
year = {2023}
}
Probabilistic and Physics-Informed Machine Learning for Predictive Maintenance with Time Series Data, Phan-Anh Vu, Emanuel Aldea, Mounira Bouarroudj and Sylvie Le Hégarat-Mascle, EuroSimE 2023, draft, bib
@INPROCEEDINGS{vu23eurosime,
author={Vu, Phan-Anh and Aldea, Emanuel and Bouarroudj, Mounira and Hégarat-Mascle, Sylvie Le},
booktitle={2023 24th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE)},
title={Probabilistic and Physics-Informed Machine Learning for Predictive Maintenance with Time Series Data},
year={2023},
volume={},
number={},
pages={1-8},
keywords={},
doi={10.1109/EuroSimE56861.2023.10100781},
ISSN={2833-8596},
month={April}
}
Handling Noisy Annotations in Deep Supervised Learning, Ichraq Lemghari, Sylvie Le Hégarat-Mascle, Emanuel Aldea and Jennifer Vandoni, QCAV 2023, draft, bib
@inproceedings{lemghari23qcav,
author = {Ichraq Lemghari and
Sylvie Le Hégarat-Mascle and
Emanuel Aldea and
Jennifer Vandoni},
title = {Handling Noisy Annotations in Deep Supervised Learning},
booktitle = {2023 16th International Conference on Quality Control in Artificial Vision (QCAV)},
year = {2023}
}
On Monocular Depth Estimation and Uncertainty Quantification Using Classification Approaches for Regression, Xuanlong Yu, Gianni Franchi and Emanuel Aldea, ICIP 2022, draft, bib
@inproceedings{yu22icip,
author = {Xuanlong Yu and
Gianni Franchi and
Emanuel Aldea},
title = {On Monocular Depth Estimation and Uncertainty Quantification Using Classification Approaches for Regression},
booktitle = {2022 IEEE International Conference on Image Processing (ICIP)},
pages={1481-1485},
doi={10.1109/ICIP46576.2022.9897930}},
year = {2022}
}
MUAD: Multiple Uncertainties for Autonomous Driving benchmark for multiple uncertainty types and tasks, Gianni Franchi, Xuanlong Yu, Andrei Bursuc, Angel Tena, Rémi Kazmierczak, Severine Dubuisson, Emanuel Aldea and David Filliat, BMVC 2022, online version, bib
@inproceedings{franchi22bmvc,
author = {Gianni Franchi and
Xuanlong Yu and
Andrei Bursuc and
Angel Tena and
Rémi Kazmierczak and
Severine Dubuisson and
Emanuel Aldea and
David Filliat},
title = {MUAD: Multiple Uncertainties for Autonomous Driving benchmark for multiple uncertainty types and tasks},
booktitle = {33rd British Machine Vision Conference, {BMVC} 2022},
year = {2022}
}
Spectral Analysis of Masked Signals in the Context of Image Inpainting, Sylvie Le Hégarat-Mascle and Emanuel Aldea Image Analysis and Processing. {ICIAP} 2022 Workshops, 2022 draft, bib
@inproceedings{lehegarat22iciap,
author = {Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea},
editor = {Pier Luigi Mazzeo and
Emanuele Frontoni and
Stan Sclaroff and
Cosimo Distante},
title = {Spectral Analysis of Masked Signals in the Context of Image Inpainting},
booktitle = {Image Analysis and Processing. {ICIAP} 2022 Workshops - {ICIAP} International
Workshops, Lecce, Italy, May 23-27, 2022, Revised Selected Papers,
Part {I}},
series = {Lecture Notes in Computer Science},
volume = {13373},
pages = {105--114},
publisher = {Springer},
year = {2022},
url = {https://doi.org/10.1007/978-3-031-13321-3\_10},
doi = {10.1007/978-3-031-13321-3\_10}
}
Latent Discriminant Deterministic Uncertainty, Gianni Franchi, Xuanlong Yu, Andrei Bursuc, Emanuel Aldea, Séverine Dubuisson and David Filliat, ECCV 2022, draft, bib
@inproceedings{franchi22eccv,
author = {Gianni Franchi and
Xuanlong Yu and
Andrei Bursuc and
Emanuel Aldea and
S{\'{e}}verine Dubuisson and
David Filliat},
title = {Latent Discriminant Deterministic Uncertainty},
booktitle = {Computer Vision - {ECCV} 2022 - 17th European Conference},
series = {Lecture Notes in Computer Science},
year = {2022}
}
A-contrario framework for detection of alterations in varnished surfaces, Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi and Marco Malagodi, Journal of Visual Communication and Image Representation, 2022 draft, bib
@article{rezaei22jvci,
author = {Alireza Rezaei and
Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea and
Piercarlo Dondi and
Marco Malagodi},
title = {A-contrario framework for detection of alterations in varnished surfaces},
journal = {J. Vis. Commun. Image Represent.},
volume = {83},
pages = {103357},
year = {2022},
url = {https://doi.org/10.1016/j.jvcir.2021.103357},
doi = {10.1016/j.jvcir.2021.103357}
}
One Versus all for deep Neural Network Incertitude (OVNNI) quantification, Gianni Franchi, Andrei Bursuc, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, IEEE Access, 2022 online version, bib
@article{franchi22access,
author={Franchi, Gianni and Bursuc, Andrei and Aldea, Emanuel and Dubuisson, Séverine and Bloch, Isabelle},
journal={IEEE Access},
title={One Versus All for Deep Neural Network for Uncertainty (OVNNI) Quantification},
year={2022},
volume={10},
number={},
pages={7300-7312},
doi={10.1109/ACCESS.2021.3138978}}
}
SLURP: Side Learning Uncertainty for Regression Problems, Xuanlong Yu, Gianni Franchi and Emanuel Aldea, BMVC 2021, online version, bib
@inproceedings{yu21bmvc,
author = {Xuanlong Yu and
Gianni Franchi and
Emanuel Aldea},
title = {SLURP: Side Learning Uncertainty for Regression Problems},
booktitle = {32nd British Machine Vision Conference, {BMVC} 2021,
Virtual Event / November 22-25, 2021},
year = {2021}
}
Analysis of Multi-temporal Image Series for the Preventive Conservation of Varnished Wooden Surfaces, Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi and Marco Malagodi, 16th International Symposium on Advances in Visual Computing (ISVC) , 2021 draft, bib
@inproceedings{rezaei21isvc,
author = {Alireza Rezaei and
Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea and
Piercarlo Dondi and
Marco Malagodi},
editor = {George Bebis and
Vassilis Athitsos and
Tong Yan and
Manfred Lau and
Frederick Li and
Conglei Shi and
Xiaoru Yuan and
Christos Mousas and
Gerd Bruder},
title = {Analysis of Multi-temporal Image Series for the Preventive Conservation
of Varnished Wooden Surfaces},
booktitle = {Advances in Visual Computing - 16th International Symposium, {ISVC}
2021, Virtual Event, October 4-6, 2021, Proceedings, Part {I}},
series = {Lecture Notes in Computer Science},
volume = {13017},
pages = {166--179},
publisher = {Springer},
year = {2021},
url = {https://doi.org/10.1007/978-3-030-90439-5\_14},
doi = {10.1007/978-3-030-90439-5\_14}
}
Belief Functions Clustering for Epipole Localization, Huiqin Chen, Sylvie Le Hégarat-Mascle and Emanuel Aldea, International Journal of Approximate Reasoning, 2021 draft, bib
@article{chen21ijar,
title = {Belief functions clustering for epipole localization},
journal = {International Journal of Approximate Reasoning},
volume = {137},
pages = {146-165},
year = {2021},
issn = {0888-613X},
doi = {https://doi.org/10.1016/j.ijar.2021.07.003},
url = {https://www.sciencedirect.com/science/article/pii/S0888613X2100102X},
author = {Huiqin Chen and Sylvie {Le Hégarat-Mascle} and Emanuel Aldea},
}
One Versus all for deep Neural Network Incertitude (OVNNI) quantification, Gianni Franchi, Andrei Bursuc, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, NeurIPS 2020 workshop on Bayesian Deep Learning , 2020 poster, bib
@misc{franchi20nips1,
title={One Versus all for deep Neural Network Incertitude (OVNNI) quantification},
author={Gianni Franchi and Andrei Bursuc and Emanuel Aldea and Severine Dubuisson and Isabelle Bloch},
booktitle = {NeurIPS 2020 workshop on Bayesian Deep Learning},
year = {2020}
}
Encoding the latent posterior of Bayesian Neural Networks for uncertainty quantification
, Gianni Franchi, Andrei Bursuc, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, NeurIPS 2020 workshop on Bayesian Deep Learning , 2020 poster, bib
@misc{franchi20nips2,
title={Encoding the latent posterior of Bayesian Neural Networks for uncertainty quantification
},
author={Gianni Franchi and Andrei Bursuc and Emanuel Aldea and Severine Dubuisson and Isabelle Bloch},
booktitle = {NeurIPS 2020 workshop on Bayesian Deep Learning},
year = {2020}
}
One step clustering based on a-contrario framework for detection of alterations in historical violins, Alireza Rezaei, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Piercarlo Dondi and Marco Malagodi, ICPR 2020, draft, bib
@inproceedings{rezaei20icpr,
author = {Alireza Rezaei and
Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea and
Piercarlo Dondi and
Marco Malagodi},
title = {One step clustering based on a-contrario framework for detection of
alterations in historical violins},
booktitle = {25th International Conference on Pattern Recognition, {ICPR} 2020,
Virtual Event / Milan, Italy, January 10-15, 2021},
pages = {9348--9355},
publisher = {{IEEE}},
year = {2020}
}
TRADI: Tracking deep neural network weight distributions, Gianni Franchi, Andrei Bursuc, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, ECCV 2020, online version, slides, bib
@inproceedings{franchi20eccv,
author = {Gianni Franchi and
Andrei Bursuc and
Emanuel Aldea and
S{\'{e}}verine Dubuisson and
Isabelle Bloch},
editor = {Andrea Vedaldi and
Horst Bischof and
Thomas Brox and
Jan{-}Michael Frahm},
title = {{TRADI:} Tracking Deep Neural Network Weight Distributions},
booktitle = {Computer Vision - {ECCV} 2020 - 16th European Conference, Glasgow,
UK, August 23-28, 2020, Proceedings, Part {XVII}},
series = {Lecture Notes in Computer Science},
volume = {12362},
pages = {105--121},
publisher = {Springer},
year = {2020}
}
Tracking Hundreds of People in Densely Crowded Scenes with Particle Filtering Supervising Deep Convolutional Neural Networks , Gianni Franchi, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, Proceedings of the 27th International Conference on Image Processing (ICIP), 2020 draft, bib
@inproceedings{franchi20icip,
title = {Tracking Hundreds of People in Densely Crowded Scenes with Particle Filtering Supervising Deep Convolutional Neural Networks},
author = {Franchi, Gianni and Aldea, Emanuel and Dubuisson, S{\'e}verine and Bloch, Isabelle},
booktitle = {Proceedings of the 27th International Conference on Image Processing (ICIP)},
year = {2020}
}
Fast and efficient reconstruction of digitized frescoes , Nicolas Lermé, Sylvie Le Hégarat-Mascle, Boyang Zhang and Emanuel Aldea, Pattern Recognition Letters , 2020 draft, bib
@article{lerme20prl,
title={Fast and efficient reconstruction of digitized frescoes},
author={Lerm{\'e}, Nicolas and Le H{\'e}garat-Mascle, Sylvie and Zhang, Boyang and Aldea, Emanuel},
journal={Pattern Recognition Letters},
volume={138},
pages={417--423},
year={2020},
publisher={Elsevier}
}
Camera Localization based on Belief Clustering, Huiqin Chen, Sylvie Le Hégarat-Mascle and Emanuel Aldea Proceedings of the 23rd International Conference on Information Fusion (FUSION), 2020 draft, bib
@inproceedings{chen20fusion,
author = {Chen, Huiqin and Le H{\'e}garat-Mascle, Sylvie and Aldea, Emanuel},
booktitle = {Proceedings of the 23rd International Conference on Information Fusion (FUSION)},
title = {Camera Localization based on Belief Clustering},
year = {2020}
}
Use of Scene Geometry Priors for Data Association in Egocentric Views, Huiqin Chen, Emanuel Aldea, Sylvie Le Hégarat-Mascle and Vincent Despiegel, Proceedings of the 8th International Workshop on Biometrics and Forensics (IWBF2020), 2020 draft, bib
@inproceedings{chen20iwbf,
author = {Chen, Huiqin and Aldea, Emanuel and Le H{\'e}garat-Mascle, Sylvie and Despiegel, Vincent },
booktitle = {Proceedings of the 8th International Workshop on Biometrics and Forensics (IWBF2020)},
title = {Use of Scene Geometry Priors for Data Association in Egocentric Views},
year = {2020}
}
Augmenting Deep Learning Performance in an Evidential Multiple Classifier System , Jennifer Vandoni, Sylvie Le Hégarat-Mascle and Emanuel Aldea, Sensors , 2019 online version, bib
@article{vandoni19sensors,
AUTHOR = {Vandoni, Jennifer and H{\'e}garat-Mascle, Sylvie Le and Aldea, Emanuel},
TITLE = {Augmenting Deep Learning Performance in an Evidential Multiple Classifier System},
JOURNAL = {Sensors},
VOLUME = {19},
YEAR = {2019},
NUMBER = {21},
ARTICLE-NUMBER = {4664},
URL = {https://www.mdpi.com/1424-8220/19/21/4664},
ISSN = {1424-8220},
DOI = {10.3390/s19214664}
}
Constraining Relative Camera Pose Estimation with Pedestrian Detector-Based Correspondence Filters, Emanuel Aldea, Thomas Pollok and Chengchao Qu, Proceedings of the 16th IEEE International Conference on Advanced Video and Signal based Surveillance (AVSS), 2019 draft, bib
@inproceedings{aldea19avss,
author={E. {Aldea} and T. {Pollok} and C. {Qu}},
booktitle={2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS)},
title={Constraining Relative Camera Pose Estimation with Pedestrian Detector-Based Correspondence Filters},
year={2019},
volume={},
number={},
pages={1-7}
}
Crowd Behaviour Characterization for Scene Tracking , Gianni Franchi, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, Proceedings of the 16th IEEE International Conference on Advanced Video and Signal based Surveillance (AVSS), 2019 draft, bib
@inproceedings{franchi19avss,
author={G. {Franchi} and E. {Aldea} and S. {Dubuisson} and I. {Bloch}},
booktitle={2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS)},
title={Crowd Behavior Characterization for Scene Tracking},
year={2019},
volume={},
number={},
pages={1-8}
}
Determining Epipole Location Integrity by Multimodal Sampling, Huiqin Chen, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the 16th IEEE International Conference on Advanced Video and Signal based Surveillance (AVSS), The 3th International Workshop on Traffic and Street Surveillance for Safety and Security (IWT4S), 2019 draft, bib
@inproceedings{chen19avss, author={H. {Chen} and E. {Aldea} and S. L. {Hégarat-Mascle}},
booktitle={2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS)},
title={Determining Epipole Location Integrity by Multimodal Sampling},
year={2019},
volume={},
number={},
pages={1-8}
}
Detecting alterations in historical violins with optical monitoring, Alireza Rezaei, Emanuel Aldea, Piercarlo Dondi, Marco Malagodi and Sylvie Le Hégarat-Mascle, Proceedings of the 14th International Conference on Quality Control by Artificial Vision (QCAV), 2019 draft, bib
@inproceedings{rezaei19qcav,
author = {Rezaei, Alireza and Aldea, Emanuel and Dondi, Piercarlo and Malagodi, Marco and Le H{\'e}garat-Mascle, Sylvie },
booktitle = {Proceedings of the 14th International Conference on Quality Control by Artificial Vision (QCAV)},
year = {2019},
doi = {10.1117/12.2521702},
URL = {https://doi.org/10.1117/12.2521702},
title = {Detecting alterations in historical violins with optical monitoring}
}
Efficient evaluation of the Number of False Alarm criterion , Sylvie Le Hgarat-Mascle , Emanuel Aldea and Jennifer Vandoni EURASIP Journal on Image and Video Processing , 2019 online version, bib
@article{hegarat19jivp,
author = {Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea and
Jennifer Vandoni},
title = {Efficient evaluation of the Number of False Alarm criterion},
journal = {{EURASIP} J. Image and Video Processing},
volume = {2019},
pages = {35},
year = {2019},
url = {https://doi.org/10.1186/s13640-019-0429-4}
}
Integrating Visual and Geometric Consistency for Pose Estimation, Huiqin Chen, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the 16th International Conference on Machine Vision Applications (MVA), 2019 draft, bib
@inproceedings{chen19mva,
author={H. {Chen} and E. {Aldea} and S. {Le Hégarat-Mascle}},
booktitle={2019 16th International Conference on Machine Vision Applications (MVA)},
title={Integrating Visual and Geometric Consistency for Pose Estimation},
year={2019},
pages={1-5},
doi={10.23919/MVA.2019.8757911},
ISSN={},
month={May}
}
Wide baseline pose estimation from video with a density-based uncertainty model, Nicola Pellicanò, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Machine Vision and Applications, 2019 draft, full-text online, bib
@article{Pellicano2019,
author="Pellican{\`o}, Nicola
and Aldea, Emanuel
and Le H{\'e}garat-Mascle, Sylvie",
title="Wide baseline pose estimation from video with a density-based uncertainty model",
journal="Machine Vision and Applications",
year="2019",
month="Jun",
day="13",
abstract="Robust wide baseline pose estimation is an essential step in the deployment of smart camera networks. In this work, we highlight some current limitations of conventional strategies for relative pose estimation in difficult urban scenes. Then, we propose a solution which relies on an adaptive search of corresponding interest points in synchronized video streams which allows us to converge robustly toward a high-quality solution. The core idea of our algorithm is to build across the image space a nonstationary mapping of the local pose estimation uncertainty, based on the spatial distribution of interest points. Subsequently, the mapping guides the selection of new observations from the video stream in order to prioritize the coverage of areas of high uncertainty. With an additional step in the initial stage, the proposed algorithm may also be used for refining an existing pose estimation based on the video data; this mode allows for performing a data-driven self-calibration task for stereo rigs for which accuracy is critical, such as onboard medical or vehicular systems. We validate our method on three different datasets which cover typical scenarios in pose estimation. The results show a fast and robust convergence of the solution, with a significant improvement, compared to single image-based alternatives, of the RMSE of ground-truth matches, and of the maximum absolute error.",
issn="1432-1769",
doi="10.1007/s00138-019-01036-6",
url="https://doi.org/10.1007/s00138-019-01036-6"
}
Evaluating Crowd Density Estimators via Their Uncertainty Bounds , Jennifer Vandoni, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the 26th International Conference on Image Processing (ICIP) , 2019 draft, bib
@inproceedings{vandoni19icip,
author = {Vandoni, Jennifer and Aldea, Emanuel and Le H{\'e}garat-Mascle, Sylvie },
booktitle = {Proceedings of the 26th International Conference on Image Processing (ICIP) },
title = {Evaluating Crowd Density Estimators via Their Uncertainty Bounds},
year = {2019}
}
Evidential Query-By-Committee Active Learning for Pedestrian Detection in High-Density Crowds, Jennifer Vandoni, Emanuel Aldea and Sylvie Le Hégarat-Mascle, International Journal of Approximate Reasoning, 2019 draft, bib
@article{vandoni19ijar,
title = "Evidential query-by-committee active learning for pedestrian detection in high-density crowds",
journal = "International Journal of Approximate Reasoning",
volume = "104",
pages = "166 - 184",
year = "2019",
issn = "0888-613X",
doi = "https://doi.org/10.1016/j.ijar.2018.11.007",
url = "http://www.sciencedirect.com/science/article/pii/S0888613X18303517",
author = "Jennifer Vandoni and Emanuel Aldea and Sylvie Le Hégarat-Mascle"
}
2CoBel: A Scalable Belief Function Representation for 2D Discernment Frames, Nicola Pellicanò, Sylvie Le Hégarat-Mascle and Emanuel Aldea, International Journal of Approximate Reasoning, 2018 draft, bib
@article{pellicano18ijar,
author = {Pellican{\`o}, Nicola and Le H{\'e}garat-Mascle, Sylvie and Aldea, Emanuel },
title = "2CoBel: A scalable belief function representation for 2D discernment frames",
journal = "International Journal of Approximate Reasoning",
volume = "103",
pages = "320 - 342",
year = "2018",
issn = "0888-613X",
doi = "https://doi.org/10.1016/j.ijar.2018.10.007",
url = "http://www.sciencedirect.com/science/article/pii/S0888613X18303864"
}
GPU-accelerated Height Map Estimation with Local Geometry Priors in Large Scenes, Alireza Rezaei, Nicola Pellicanò, and Emanuel Aldea, Proceedings of the 15th IEEE International Conference on Advanced Video and Signal based Surveillance (AVSS), 2018 draft, bib
@inproceedings{rezaei18avss,
author = {Rezaei, Alireza and Pellican{\`o}, Nicola and Aldea, Emanuel },
booktitle = {Proceedings of the 15th IEEE International Conference on Advanced Video and Signal based Surveillance (AVSS)},
title = {GPU-accelerated Height Map Estimation with Local Geometry Priors in Large Scenes},
year = {2018}
}
Evidential Split and Merge: Application to Object-Based Image Analysis, Marie Lachaize, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Aude Maitrot and Roger Reynaud, International Journal of Approximate Reasoning, draft, bib
@article{lachaize18ijar,
title = "Evidential split-and-merge: Application to object-based image analysis",
author = "Marie Lachaize and Sylvie Le H{\'e}garat-Mascle and Emanuel Aldea and Aude Maitrot and Roger Reynaud",
journal = "International Journal of Approximate Reasoning",
volume = "103",
pages = "303 - 319",
year = "2018",
issn = "0888-613X",
doi = "https://doi.org/10.1016/j.ijar.2018.10.008",
url = "http://www.sciencedirect.com/science/article/pii/S0888613X18302986"
}
2CoBel: An Efficient Belief Function Extension for Two-dimensional Continuous Spaces, Nicola Pellicanò, Sylvie Le Hégarat-Mascle and Emanuel Aldea, Proceedings of the 21st International Conference on Information Fusion (FUSION), 2018 draft, bib
@inproceedings{pellicano18fusion,
author = {Pellican{\`o}, Nicola and Le H{\'e}garat-Mascle, Sylvie and Aldea, Emanuel },
booktitle = {Proceedings of the 21st International Conference on Information Fusion (FUSION)},
title = {2{C}o{B}el: An Efficient Belief Function Extension for Two-dimensional Continuous Spaces},
pages={1032-1039},
doi={10.23919/ICIF.2018.8455783},
year = {2018}
}
Belief Function Definition for Ensemble Methods - Application to Pedestrian Detection in Dense Crowds, Jennifer Vandoni, Sylvie Le Hégarat-Mascle and Emanuel Aldea, Proceedings of the 21st International Conference on Information Fusion (FUSION), 2018 draft, bib
@inproceedings{vandoni18fusion,
author = {Vandoni, Jennifer and Le H{\'e}garat-Mascle, Sylvie and Aldea, Emanuel },
booktitle = {Proceedings of the 21st International Conference on Information Fusion (FUSION)},
title = {Belief Function Definition for Ensemble Methods - Application to Pedestrian Detection in Dense Crowds},
pages={2481-2488},
doi={10.23919/ICIF.2018.8455313},
year = {2018}
}
Evidential framework for Error Correcting Output Code classification, Marie Lachaize, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Aude Maitrot and Roger Reynaud, Engineering Applications of Artificial Intelligence
, 2018 final draft, bib
@article{lachaize18eaai,
title = "Evidential framework for {E}rror {C}orrecting {O}utput {C}ode classification",
journal = "Engineering Applications of Artificial Intelligence",
volume = "73",
pages = "10 - 21",
year = "2018",
issn = "0952-1976",
doi = "https://doi.org/10.1016/j.engappai.2018.04.019",
url = "http://www.sciencedirect.com/science/article/pii/S0952197618300988",
author = "Marie Lachaize and Sylvie Le H{\'e}garat-Mascle and Emanuel Aldea and Aude Maitrot and Roger Reynaud"
}
A novel approach for multi-object tracking using evidential representation for objects, Wafa Rekik, Sylvie Le Hégarat-Mascle and Emanuel Aldea, Proceedings of the 20th International Conference on Information Fusion (FUSION), 2017 final draft, bib
@inproceedings{rekik17fusion,
author = {Wafa Rekik and
Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea},
title = {A novel approach for multi-object tracking using evidential representation
for objects},
booktitle = {20th International Conference on Information Fusion, {FUSION} 2017,
Xi'an, China, July 10-13, 2017},
pages = {1--8},
year = {2017},
url = {https://doi.org/10.23919/ICIF.2017.8009819},
doi = {10.23919/ICIF.2017.8009819}
}
An Evidential Framework for Pedestrian Detection in High-Density Crowds, Jennifer Vandoni, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the 14th IEEE International Conference on Advanced Video and Signal based Surveillance (AVSS), 2017 final draft, bib
@inproceedings{vandoni17avss,
author = {Jennifer Vandoni and
Emanuel Aldea and
Sylvie Le H{\'{e}}garat{-}Mascle},
title = {An evidential framework for pedestrian detection in high-density crowds},
booktitle = {14th {IEEE} International Conference on Advanced Video and Signal
Based Surveillance, {AVSS} 2017, Lecce, Italy, August 29 - September
1, 2017},
pages = {1--6},
year = {2017},
url = {https://doi.org/10.1109/AVSS.2017.8078498},
doi = {10.1109/AVSS.2017.8078498}
}
Active Learning for High-Density Crowd Count Regression, Jennifer Vandoni, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the 14th IEEE International Conference on Advanced Video and Signal based Surveillance (AVSS) - 2nd Workshop on Signal Processing for Understanding Crowd Dynamics, 2017 final draft, bib
@inproceedings{vandoni17spcrowd,
author = {Jennifer Vandoni and
Emanuel Aldea and
Sylvie Le H{\'{e}}garat{-}Mascle},
title = {Active learning for high-density crowd count regression},
booktitle = {14th {IEEE} International Conference on Advanced Video and Signal
Based Surveillance, {AVSS} 2017, Lecce, Italy, August 29 - September
1, 2017},
pages = {1--6},
year = {2017},
url = {https://doi.org/10.1109/AVSS.2017.8078508},
doi = {10.1109/AVSS.2017.8078508}
}
Geometry-Based Multiple Camera Head Detection in Dense Crowds, Nicola Pellicanò, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the 28th British Machine Vision Conference (BMVC) - 5th Activity Monitoring by Multiple Distributed Sensing Workshop, 2017 final draft, bib
@inproceedings{pellicano17ammds,
author = {Pellican{\`o}, Nicola and Aldea, Emanuel and Le H{\'e}garat-Mascle, Sylvie},
booktitle = {Proceedings of the 28th British Machine Vision Conference (BMVC) - 5th Activity Monitoring by Multiple Distributed Sensing Workshop},
title = {Geometry-Based Multiple Camera Head Detection in Dense Crowds},
year = {2017}
}
Pressure Estimation In A High-Density Crowd
Using A Multi-Scale Count Regressor, Emanuel Aldea and Khurom H. Kiyani, Proceedings of the 12th International Conference on Traffic and Granular Flow (TGF), 2017 bib
@inproceedings{aldea17tgf,
author = {Aldea, Emanuel and Kiyani, Khurom H.},
booktitle = {Proceedings of the 12th International Conference on Traffic and Granular Flow (TGF)},
title = {Pressure Estimation In A High-Density Crowd
Using A Multi-Scale Count Regressor},
year = {2017}
}
Evidential multi-class classification from binary classifiers: application to waste sorting quality control from hyperspectral data, Marie Lachaize, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Aude Maitrot and Roger Reynaud, Proceedings of the 13th International Conference on Quality Control by Artificial Vision (QCAV), 2017 final draft, bib
@inproceedings{lachaize17qcav,
author = {Marie Lachaize and
Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea and
Aude Maitrot and
Roger Reynaud},
title = {Evidential multi-class classification from binary classifiers: application
to waste sorting quality control from hyperspectral data},
booktitle = {Thirteenth International Conference on Quality Control by Artificial
Vision, {QCAV} 2017, Tokyo, Japan, May 14, 2017},
pages = {103380V},
year = {2017},
url = {https://doi.org/10.1117/12.2266961},
doi = {10.1117/12.2266961}
}
Crack Detection Based on a Marked Point Process Model, Jennifer Vandoni, Sylvie Le Hégarat-Mascle and Emanuel Aldea, Proceedings of the International Conference on Pattern Recognition (ICPR), 2016 final draft, supp. material, bib
@inproceedings{vandoni16icpr,
author = {Jennifer Vandoni and
Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea},
title = {Crack detection based on a {M}arked {P}oint {P}rocess model},
booktitle = {23rd International Conference on Pattern Recognition, {ICPR} 2016,
Canc{\'{u}}n, Mexico, December 4-8, 2016},
pages = {3933--3938},
year = {2016}
}
Robust Wide Baseline Pose Estimation from Video, Nicola Pellicanò, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the International Conference on Pattern Recognition (ICPR), 2016 final draft, supp. material, bib
@inproceedings{pellicano16icpr,
author = {Nicola Pellican{\`o} and
Emanuel Aldea and
Sylvie Le H{\'{e}}garat{-}Mascle},
title = {Robust wide baseline pose estimation from video},
booktitle = {23rd International Conference on Pattern Recognition, {ICPR} 2016,
Canc{\'{u}}n, Mexico, December 4-8, 2016},
pages = {3820--3825},
year = {2016}
}
HOOFR: An Enhanced Bio-Inspired Feature Extractor, Dai-Duong Nguyen, Abdelhafid El Ouardi, Emanuel Aldea and Samir Bouaziz, Proceedings of the International Conference on Pattern Recognition (ICPR), 2016 final draft, bib
@inproceedings{nguyen16icpr,
author = {Dai Duong Nguyen and
Abdelhafid Elouardi and
Emanuel Aldea and
Samir Bouaziz},
title = {{HOOFR:} An enhanced bio-inspired feature extractor},
booktitle = {23rd International Conference on Pattern Recognition, {ICPR} 2016,
Canc{\'{u}}n, Mexico, December 4-8, 2016},
pages = {2977--2982},
year = {2016}
}
SVM Classifier Fusion Using Belief Functions: Application to Hyperspectral Data Classification, Marie Lachaize, Sylvie Le Hégarat-Mascle, Emanuel Aldea, Aude Maitrot and Roger Reynaud, Proceedings of the 4th International Conference on Belief Functions (BELIEF), 2016 final draft, bib
@inproceedings{lachaize16belief,
author = {Marie Lachaize and
Sylvie Le H{\'{e}}garat{-}Mascle and
Emanuel Aldea and
Aude Maitrot and
Roger Reynaud},
title = {{SVM} Classifier Fusion Using Belief Functions: Application to Hyperspectral
Data Classification},
booktitle = {Belief Functions: Theory and Applications - 4th International Conference,
{BELIEF} 2016, Prague, Czech Republic, September 21-23, 2016, Proceedings},
pages = {113--122},
year = {2016}
}
Robust crack detection for unmanned aerial vehicles inspection in an a-contrario decision framework, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Journal of Electronic Imaging, , 2015 final draft, bib
@article{aldea15jei,
author = {Aldea, Emanuel and Le H{\'e}garat-Mascle, Sylvie},
title = {Robust crack detection for unmanned aerial vehicles inspection in an a-contrario decision framework},
journal = {Journal of Electronic Imaging},
volume = {24},
number = {6},
pages = {061119},
year = {2015},
isbn = {1017-9909},
doi = {10.1117/1.JEI.24.6.061119},
URL = { http://dx.doi.org/10.1117/1.JEI.24.6.061119}
}
Robust crack detection strategies for aerial inspection, Emanuel Aldea and Sylvie Le Hégarat-Mascle, Proceedings of the Twelfth International Conference on Quality Control by Artificial Vision (QCAV), 2015 final draft, bib
@inproceedings{aldea15qcav,
author = {Aldea, Emanuel and Le H{\'e}garat-Mascle, Sylvie},
title = {Robust crack detection strategies for aerial inspection},
booktitle = {Proceedings of the Twelfth International Conference on Quality Control by Artificial Vision },
volume = {9534},
pages = {953413-953413-8},
year = {2015},
doi = {10.1117/12.2182920},
URL = { http://dx.doi.org/10.1117/12.2182920}
}
Spatio-Temporal Consistency for Head Detection in High-Density Scenes, Emanuel Aldea and Davide Marastoni and Khurom H. Kiyani, Proceedings of the ACCV Workshop on Human Identification for Surveillance (HIS), 2014 final draft, slides, bib
@inproceedings{aldea14accv1,
author = {Aldea, Emanuel and Marastoni, Davide and Kiyani, Khurom H.},
title = {Spatio-Temporal Consistency for Head Detection in High-Density Scenes},
booktitle = {Computer Vision - {ACCV} 2014 Workshops - Singapore, Singapore, November
1-2, 2014, Revised Selected Papers, Part {III}},
pages = {665--679},
year = {2014}
}
Hybrid Focal Stereo Networks for Pattern Analysis in Homogeneous Scenes, Emanuel Aldea and Khurom H. Kiyani, Proceedings of the ACCV Workshop on Human Identification for Surveillance (HIS), 2014 final draft, slides, bib
@inproceedings{aldea14accv2,
author={Aldea, Emanuel and Kiyani, Khurom H.},
title = {Hybrid Focal Stereo Networks for Pattern Analysis in Homogeneous Scenes},
booktitle = {Computer Vision - {ACCV} 2014 Workshops - Singapore, Singapore, November
1-2, 2014, Revised Selected Papers, Part {III}},
pages = {695--710},
year = {2014}
}
SuperFAST: Model-based adaptive corner detection for scalable robotic vision, Gaspard Florentz and Emanuel Aldea, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014 final draft, bib
@inproceedings{florentz14iros,
author={Florentz, Gaspard and Aldea, Emanuel},
booktitle={2014 IEEE/RSJ International Conference on Intelligent Robots and Systems},
title={Super{FAST}: Model-based adaptive corner detection for scalable robotic vision},
year={2014},
pages={1003-1010},
doi={10.1109/IROS.2014.6942681},
ISSN={2153-0858},
month={Sept}
}
SO(3)-invariant asymptotic observers for dense depth field estimation based on visual data and known camera motion, Nadège Zarrouati, Emanuel Aldea and Pierre Rouchon, Proceedings of the American Control Conference (ACC), 2012 final draft, bib
@inproceedings{zarrouati12acc,
author = {Zarrouati, Nad{\`e}ge and Aldea, Emanuel and Rouchon, Pierre},
title = {SO(3)-invariant asymptotic observers for dense depth field estimation based on visual data and known camera motion},
booktitle = {American Control Conference 2012},
address = {Montreal},
pages = {4116 - 4123},
year = {2012}
}
Robust depth regularization explicitly constrained by camera motion, Nadège Zarrouati, Emanuel Aldea and Pierre Rouchon, Proceedings of the International Conference on Pattern Recognition (ICPR), 2012 final draft, bib
@inproceedings{zarrouati12icpr,
author = {Zarrouati, Nad{\`e}ge and Aldea, Emanuel and Rouchon, Pierre},
title = {Robust depth regularization explicitly constrained by camera motion},
booktitle = {Proceedings of the International Conference on Pattern Recognition (ICPR)},
year = {2012},
pages = {3606-3609}
}
Estimation dense de profondeur combinant approches variationnelles et observateurs asymptotiques, Nadège Zarrouati, Emanuel Aldea and Pierre Rouchon, Reconnaissance de Formes et Intelligence Artificielle (RFIA), 2012 final draft, bib
@inproceedings{zarrouati12rfia,
author = {Zarrouati, Nad{\`e}ge and Aldea, Emanuel and Rouchon, Pierre},
title = {Estimation dense de profondeur combinant approches variationnelles et observateurs asymptotiques},
booktitle = {Actes de la conf{\'e}rence RFIA},
year = {2012},
pages = {978-2-9539515-2-3}
}
Object Tracking based on Particle Filtering with Multiple Appearance Models, Nicolas Widynski, Emanuel Aldea, Séverine Dubuisson and Isabelle Bloch, Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP), 2011 final draft, bib
@inproceedings{widynski11visapp,
author = {Widynski, Nicolas and Aldea, Emanuel and Dubuisson, S{\'e}verine and Bloch, Isabelle},
title = {Object Tracking based on Particle Filtering with Multiple Appearance Models},
booktitle = {Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP)},
year = {2011},
month = {March},
pages = {604--609},
address = {Algarve, Portugal}
}
Toward a Better Integration of Spatial Relations in Learning with Graphical Models, Emanuel Aldea and Isabelle Bloch, Advances in Knowledge Discovery and Management (AKDM), 2010 final draft, bib
@inproceedings{aldea10akdm,
author = {Aldea, Emanuel and Bloch, Isabelle},
title = {Toward a Better Integration of Spatial Relations in Learning with Graphical Models},
bookTitle="Advances in Knowledge Discovery and Management",
year={2010},
publisher={Springer Berlin Heidelberg},
address={Berlin, Heidelberg},
pages={77--94},
isbn={978-3-642-00580-0},
doi={10.1007/978-3-642-00580-0_5},
url={http://dx.doi.org/10.1007/978-3-642-00580-0_5}
}
Vers une utilisation améliorée de relations spatiales pour l'apprentissage de données dans les modèles graphiques, Emanuel Aldea and Isabelle Bloch, Extraction et Gestion des Connaissances (EGC), 2009 final draft, bib
@inproceedings{aldea09egc,
author = {Aldea, Emanuel and Bloch, Isabelle},
title = {Vers une utilisation am{\'e}lior{\'e}e de relations spatiales pour l'apprentissage de donn{\'e}es dans les mod{\`e}les graphiques},
booktitle = { Extraction et Gestion des Connaissances (EGC'2009)},
year = {2009},
pages = {271--282}
}
Kernel Fusion for Image Classification Using Fuzzy Structural Information, Emanuel Aldea, Geoffroy Fouquier, Jamal Atif and Isabelle Bloch, 3rd International Symposium on Visual Computing (ISVC), 2007 final draft, bib
@inproceedings{aldea07isvc,
author = {Aldea, Emanuel and Fouquier, Geoffroy and Atif, Jamal and Bloch, Isabelle},
title = {Kernel {F}usion for {I}mage {C}lassification {U}sing {F}uzzy {S}tructural {I}nformation},
booktitle = {3rd International Symposium on Visual Computing ISVC07},
address = {Lake Tahoe, USA},
year = 2007,
month = nov,
volume = {LNCS 4842},
pages = {307-317}
}
Classification d'images par fusion d'attributs flous de graphes, relations spatiales et noyaux marginalisés, Emanuel Aldea, Geoffroy Fouquier, Jamal Atif and Isabelle Bloch, Rencontres Francophones sur la Logique Floue et ses Applications (LFA), 2007 final draft, bib
@inproceedings{aldea07lfa,
author = {Aldea, Emanuel and Fouquier, Geoffroy and Atif, Jamal and Bloch, Isabelle},
title = {Classification d'images par fusion d'attributs flous de graphes, relations spatiales et noyaux marginalis{\'e}s},
booktitle = {Rencontres Francophones sur la Logique Floue et ses Applications},
year = 2007,
pages = {25--32}
}
Image Classification using Marginalized Kernels for Graphs, Emanuel Aldea, Jamal Atif and Isabelle Bloch, 6th IAPR-TC15 Workshop on Graph-based Representations in Pattern Recognition (GBR), 2007 final draft, bib
@inproceedings{aldea07gbr,
author = {Aldea, Emanuel and Atif, Jamal and Bloch, Isabelle},
title = {Image {C}lassification using {M}arginalized {K}ernels for {G}raphs},
booktitle = {6th IAPR-TC15 Workshop on Graph-based Representations in Pattern Recognition, GbR'07},
address = {Alicante, Spain},
year = 2007,
month = jun,
volume = {1},
pages = {103--113}
}