| In brief |

In Germany and France, a high proportion of the population lives in cities and metropolitan areas. On the one hand, the wide variety of leisure activities and cultural activities contribute significantly to the quality of life of the urban population. On the other hand, the high infrastructure density and changes in the population structure can lead to new threats to the population, which require new security solutions. The Federal Ministry of Education and Research (BMBF) and the Agence Nationale de la Recherche (ANR) strive to promote interdisciplinary research projects that strengthen security in urban areas in Germany and France with the Call for Proposals "Future Security in Urban Areas".
Main objectives The aim of the Franco-German project is to investigate new security technologies at large events with high densities of people in complex environments. Legally compliant crowd monitoring, data analysis and simulation engines will be considered in the context of crowd management. In close cooperation with rescue and emergency teams as well as end-users, example technologies will be implemented at major events.
- Video-based monitoring and analyses of crowds in cities: used for density estimations and motion evaluations in large crowds. Observations are anonymous and compliant with data privacy.
- Early detection of safety-critical activities and situations, including suspicious activities and aggressive behaviours.
- Visualization tools of the predicted crowd states and the current state-of-affairs to facilitate situational analysis and emergency service decision making. (The exchange of emergency service location information should ultimately lead to a more effective workflow).
| People involved |
Researchers:
- Emanuel Aldea: Paris Saclay University coordinator, computer vision
- Sylvie Le Hégarat-Mascle: collaborator, image processing
- Flavien Delgehier: collaborator, instrumentation
- Huiqin Chen: PhD student
- Zhuzhi Fan: Master intern
- Yixuan Yao: Master intern
| Papers published or submitted for publication |
@inproceedings{chen20fusion,
author = {Chen, Huiqin and Le H{\'e}garat-Mascle, Sylvie and Aldea, Emanuel},
booktitle = {Proceedings of the 23rd International Conference on Information Fusion (FUSION)},
title = {Camera Localization based on Belief Clustering},
year = {2020}
}
@inproceedings{chen20iwbf,
author = {Chen, Huiqin and Aldea, Emanuel and Le H{\'e}garat-Mascle, Sylvie and Despiegel, Vincent },
booktitle = {Proceedings of the 8th International Workshop on Biometrics and Forensics (IWBF2020)},
title = {Use of Scene Geometry Priors for Data Association in Egocentric Views},
year = {2020}
}
@inproceedings{aldea19avss,
author={E. {Aldea} and T. {Pollok} and C. {Qu}},
booktitle={2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS)},
title={Constraining Relative Camera Pose Estimation with Pedestrian Detector-Based Correspondence Filters},
year={2019},
volume={},
number={},
pages={1-7}
}
@inproceedings{chen19avss, author={H. {Chen} and E. {Aldea} and S. L. {Hégarat-Mascle}},
booktitle={2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS)},
title={Determining Epipole Location Integrity by Multimodal Sampling},
year={2019},
volume={},
number={},
pages={1-8}
}
@inproceedings{chen19mva,
author={H. {Chen} and E. {Aldea} and S. {Le Hégarat-Mascle}},
booktitle={2019 16th International Conference on Machine Vision Applications (MVA)},
title={Integrating Visual and Geometric Consistency for Pose Estimation},
year={2019},
pages={1-5},
doi={10.23919/MVA.2019.8757911},
ISSN={},
month={May}
}
| Related code and data |
The files below support some of the publications. They are provided with a documentation and demo examples, and a short intro is also provided here.
Data
Some of these works are performed on data we recorded. Depending on your needs, an adapted data package may be provided under the following agreement:
- strict academic research use
- no redistribution
Use of Scene Geometry Priors for Data Association in Egocentric Views

Data: annotations and pairs of images used in the experiments available upon request.
This work explores the integration of geometric priors in pedestrian localization problem formulated as multi-views data association. For one of the real datasets, we performed additional annotations that are provided at the above link. Further details are provided in the following publication(s):
@inproceedings{chen20iwbf,
author = {Chen, Huiqin and Aldea, Emanuel and Le H{\'e}garat-Mascle, Sylvie and Despiegel, Vincent },
booktitle = {Proceedings of the 8th International Workshop on Biometrics and Forensics (IWBF2020)},
title = {Use of Scene Geometry Priors for Data Association in Egocentric Views},
year = {2020}
}
Integrating Visual and Geometric Consistency for Pose Estimation
Data: We created and anonymized a dataset which is provided here.
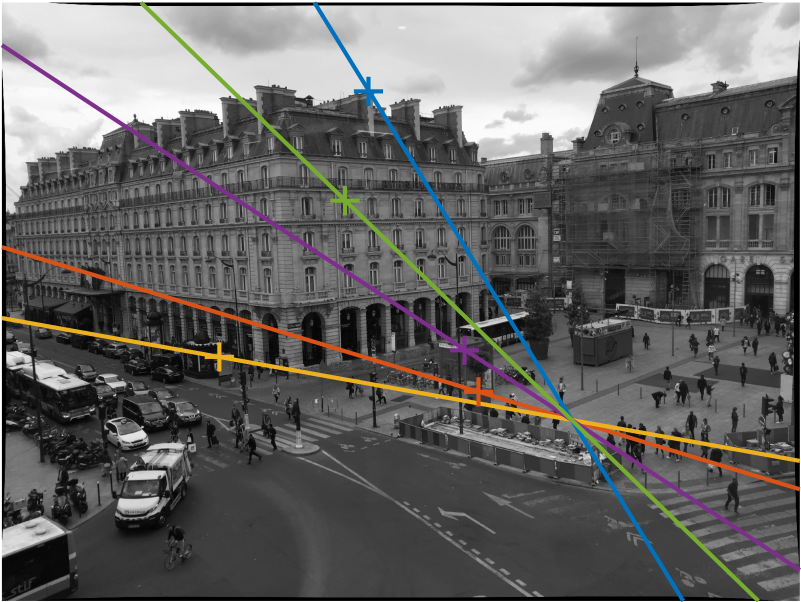
In this work, we tackle the problem of estimating the relative pose between two cameras in urban environments in the presence of additional information provided by low quality localization and orientation sensors. An M-estimator based approach provides an elegant solution for the fusion between inertial and vision data, but it is sensitive to the prior importance of the visual matches between the two views. In addition to using cues extracted from local visual similarity, we propose to rely at the same time on learned associations provided by the global geometrical coherence. Further details are provided in the following publication(s):
@inproceedings{chen19mva,
author={H. {Chen} and E. {Aldea} and S. {Le Hégarat-Mascle}},
booktitle={2019 16th International Conference on Machine Vision Applications (MVA)},
title={Integrating Visual and Geometric Consistency for Pose Estimation},
year={2019},
pages={1-5},
doi={10.23919/MVA.2019.8757911},
ISSN={},
month={May}
}