SuperFAST: Model-Based Adaptive Corner Detection for Scalable Robotic Vision
| In brief |
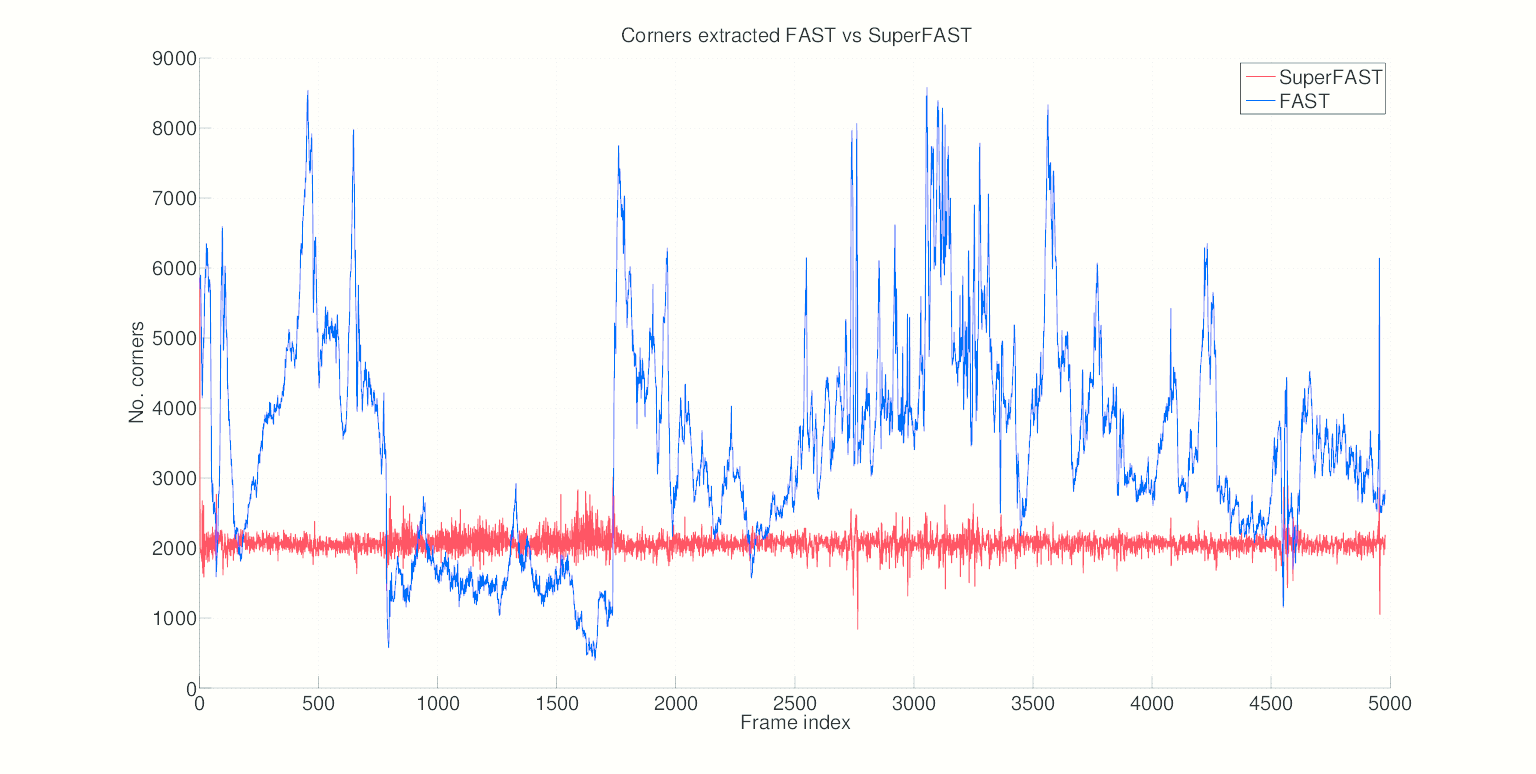
SuperFAST is an algorithm which varies automatically the corner detection threshold during a video sequence in order to provide a specific number of corners in varying scene conditions. The figure above shows in blue the variation of corners detected in a video sequence using the FAST detector with a fixed threshold. In red, the same figure shows the number of detections provided by SuperFAST which has been required to provide a constant number of 2000 detections per frame. Some important observations are:
- applicability: it may be employed for different detectors; however, it is particularly useful for real time applications, thus we illustrate it for the FAST detector
- type: this algorithm is not based on a proportional controller, and there are no gain parameters to tune. The main input is the number of desired detections.
- interest: the objective of SuperFAST is not to speed up the detection step (although it is faster than the standard detector using a low threshold). As a detector, SuperFAST provides a stable load for visual SLAM algorithms, and helps them keep track of the scene in difficult conditions and also avoids overloading them in salient environments.
| More details |
The algorithm is detailed in the following paper: "SuperFAST: Model-Based Adaptive Corner Detection for Scalable Robotic Vision", IROS 2014. You may download a preliminary version of the document here.
Abstract : In this study, we propose a novel solution to regulate the amount of interest points extracted from an image without significant additional computational cost. Our method acts at the very beginning of the detection process by using a corner occurrence model in order to predict the optimal threshold for a user-defined number of detections. Compared to existing approaches which guarantee a reasonable amount of corners by using a low threshold and then pruning the result, our approach is faster and more regular in terms of computation time as it avoids scoring and sorting the detected corners. Using the FAST detector as testbed, the strategy outlined in this article is evaluated in typical environments for robotics applications, and we report improved detection reliability during important scene variations. Taking into account the underlying visual navigation algorithms, we show that by regularizing the data input our solution facilitates a stable processing load, lower inter-frame computation time, and robustness to scene variations.
| Using SuperFAST in your work |
A Linux 32 bit binary implementation is provided here along with a usage example, which should allow you to evaluate it very easily on your own data for research purposes. Please note that this method is patented and you should get in touch with Gaspard Florentz at firstname.lastname@parrot.com if you would like to use this method for commercial purposes and/or if you would like to have access to optimized routines and code for other architectures.